




本文系统介绍高级驾驶辅助系统(ADAS)和自动驾驶所需的激光雷达、毫米波雷达、超声波传感器和摄像头传感器的原理、功能及区别。
传感器的种类及特征


毫米波雷达的原理和功能

毫米波雷达是通过毫米波段的电波测量距离、相对距离、方向等的雷达传感器。在驾驶过程中向前方发射毫米波段的电波,若前方有车辆,则可收到反射回来的回波。通过分析检测到的反射波频率变化等,检测前方及对面是否有车辆、与前方及对面车辆间的距离、相对速度和方向等。
1、毫米波雷达的分类
车辆上搭载的毫米波雷达通常使用两个波段。毫米波雷达使用的是76GHz波段的电波(毫米波*1)。BSM使用的是24GHz波段的电波(准毫米波)。

2、毫米波雷达的构成
毫米波雷达是由天线板、通信及电源模块等构成。

3、毫米波雷达的原理
通过FM-CW方式*2监测距离、相对速度和方向。


激光雷达的原理和功能
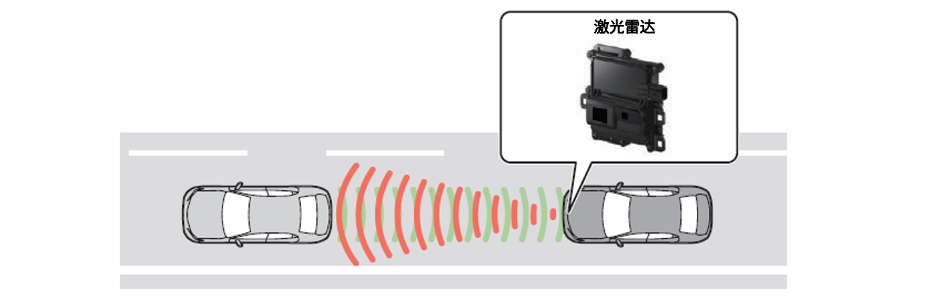
激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达。通过向目标发射探测信号(激光),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,从而获得目标的距离、方位、速度等相关信息。
1、激光雷达的分类
针对测量距离的远近,激光雷达可分为非扫描式(FLASH)激光雷达和扫描式激光雷达。

2、摄像头传感器如何工作?
摄像头传感器通过获取摄像头拍摄的车辆周边的实景画面,从实景画面中抽取场景特征信息、调整显像浓度,对画面进行预处理。根据预处理结果,更容易辨别对象的特征及形状、颜色等信息,从而提高检测速度。

3、FLASH激光雷达
在短时间内向前方发射大面积的激光,依靠高灵敏度的探测器对回波信号进行收集并绘制成像。

4、扫描式激光雷达
被称为自动驾驶领域中必不可少的传感器。它可对车辆自身位置和目标物体之间的距离以及目标物体的形状进行分析,也可对包括行车道白线在内的道路形状等进行识别。

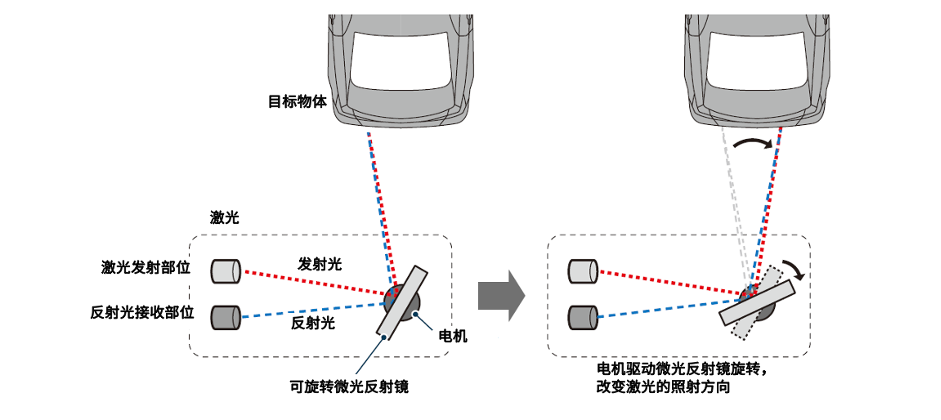
5、MEMS激光雷达
MEMS(Micro Electromechanical System)即微机电系统,是指尺寸在几毫米乃至更小的高科技装置,其内部结构一般在微米甚至纳米量级,是一个独立的智能系统。
MEMS微光反射镜是指采用光学MEMS技术制造的,把微光反射镜与MEMS驱动器继集成在一起的光学MEMS器件。MEMS微光反射镜的运动方式包括平动和扭转两种机械运动。
通过可旋转MEMS微光反射镜改变发射光束的方向,对特定范围进行扫描。目标物体会反射扫描光束,接收部件会识别反射光。通过发射激光和接收到反射光的时间,可以测定与目标物体间的距离以及目标物体的大小。
超声波传感器的原理和功能
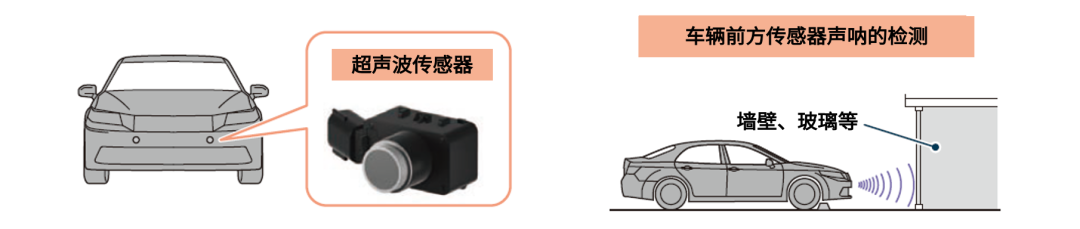
超声波传感器能被任何材质的障碍物所反射,并接收和放大障碍物反射的超声波脉冲,将超声波脉冲转换成数字信号。





















