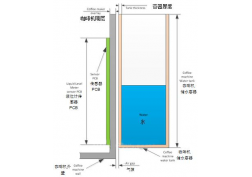
传感器PCB由互电容传感器组成,装在咖啡机的隔板中,而隔板与储水容器之间存在空隙(参见图2)。传感器的发送器和接收器位于其主板上,液体会改变它们之间的互电容。

图2:液位测量系统正视图–传感器与储水容器的相对位置
传感器主板主要包含一个发送器TX和 n 个接收器RX阵列(参见图3)组成。 n 的值取决于容器的高度和期望获得的分辨率值。接收器RX数量越多,测量分辨率就越高。

图3:使用多个接收器进行持续液位监测的互电容传感器上的发送器和接收器的布局
传感器主板上的控制器用来测量互电容。通过使用以下方程式将读数转换成液位L:

其中:
当前信号 = 所有发送传感器RX上对应液位的信号数量
空信号 = 所有发送传感器RX上容器为空时的信号数量
满信号 = 所有接收传感器TX上容器为满时的信号数量
传感器高度 = 容器高度(所有发送传感器的高度总和)
可基于上述方程式在固件中进行测量,并通过其他方法满足系统层面的要求,包括精度、线性、响应时间和功耗等。
确保精度
下面我们来讨论一下使用液位传感技术时需要考虑的重要因素,包括校准、线性度、温度补偿和传导性干扰。
校准
校准是获得精确结果所必要条件之一。等式1中的满信号和空信号数量必需在工厂中确定并储存在EEPROM中以便用于后续测量。
线性度
非线性也是一个误差来源。等式1假设发送传感器TX在从关闭状态转换为开启状态(即传感器上没有液体和有液体两种状态)时为线性响应。但实际情况不同于这种理想状态。实际数据显示,当液体沒过传感器时,发送传感器TX的信号达到最大值的时间会出现明显的延迟(参见图4)。这就导致了测量的液位出现非线性响应。