3D 传播模型建模
2)高精度惯性导航子系统
主要应用于对GPS 等传统卫星定位系统精度进行修正,在低空场景下获得精度达厘米级的定位输出,与扫描子系统进行对接。有利于建立精准的经纬度及高度三维信息,同时使无人机飞行更为稳定及安全。未修正前无GPS 高度信息,且可能由于GPS 信号受到屏蔽或者阻挡,使飞行控制出现大幅度抖动,极易出现安全问题, GPS 信息不够精确。通过在地面搭建GPS 基准平台,利用基准平台为无人机内部惯性导航子系统提供精度修正。形成以经度、纬度及高度信息组成的三维信息,建立三维模型。同时,在一些GPS信号较弱位置,无人机飞行更加稳定,抖动范围小于10 厘米。
3)信息回传子系统
对测试数据和周围场景信息在无人机平台上进行本地存储,在无线通信链路符合要求的情况下实时回传供数据后续处理之用。通过预内置的USIM 卡,连接到3/4G 网络进行信息回传,回传信息内容包括:经纬度信息、高度信息、测量接收信号强度、图片等内容。
测试分析:数据以2M 为单位回传至指定服务器,未完成上传的数据存储在无人机平台内部存储。
测试结果:信息回传子系统极大便利了数据采集,使数据完整性及实时性得到了保障。
4)干扰定位子系统
基于测向天线,对扫描无线信号赋予角度信息,通过AOA/TDOA/POA 等算法技术对信号信息进行处理,筛选符合条件的干扰信号进行大致定位,后续进一步测试和识别。
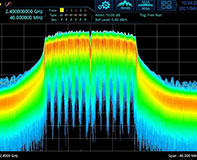
测试分析:测试中发现1000MHz 附近存在一个大约10K 带宽的信号,信号强度为-61.3dB,通过在信号周边进行长时间测试,并展现其时域信号及三维频谱图,发现此信号恒定。通过角度信息,可以进行信号定位。

测试结果:如下图所示,通过周边测试,再利用AOA/TDOA/POA 等算法计算可以初步定位该信号源处于白圈中心位置处。

5)天线测量子系统
可对现有天线垂直赋形、水平赋形、波瓣下倾、零值补偿等参数进行校准。
测试分析:测试中发现1000MHz 附近存在一个大约10K 带宽的信号,信号强度为-61.3dB,通过在信号周边进行长时间测试,并展现其时域信号及三维频谱图,发现此信号恒定。通过角度信息,可以进行信号定位。