高大上的智能机器人生产线,究竟靠什么来管控?

横河的技术专家为您揭秘:如何利用便携式示波记录仪来分析机器人的工作状态,帮助工程师设定和监测机器人的操作过程。

机械臂是“机器人”领域中广泛应用的自动化装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索领域都能见到它的身影。尽管其形态各异,但都有一个共同点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。

机械臂是一个高精度,多输入多输出、高度非线性、强耦合的复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务, 需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。

机械臂的关键部件包含高精度伺服电机与传感器。为保障机械臂动作的灵活性与精准性,需要对这些关键部件进行电信号、物理量信号与耐久性等试验。这需要使用质量可靠、操作方便的测试仪器在实验室或现场对这些电气和机械部件的结合体反复进行测试,期间需要同时监测和记录多种信号,上文视频中横河这位德国专家Joachim Hausner详细介绍了DL350在机械臂测试中的应用。
以下是视频的文字转录:
欢迎来到横河。
我是Joachim Hausner,横河测试测量公司德国西南部的销售工程师。今天我将向您介绍便携的示波记录仪DL350。DL350是DL850E的亲弟弟,最多可装配8个通道。横河示波器记录仪家族的特别之处在于其将示波器和长期记录的记录仪整合在一起。作为一款操作简单,携带方便的仪器,不到4公斤的重量和一个强大的电池,使DL350成为测量电气系统与机械部件的理想工具。横河的示波记录仪系列共有20种模块,其中18种模块可与DL350兼容。这就无需为各种测量单独采购模块。
今天我们将为您展示这个通过PWM电机调控的小机器人。这些机器人在工厂里中被广泛使用。来自驱动器的信号负责手臂的升降。手臂的具体位置是由脉冲宽度决定的。这是机器人精准执行任务的关键。
DL350启动非常迅速,因为横河使用了一个优化的操作系统。它有一个记录仪模式和一个示波器模式。这次测试,我准备选择示波器模式,因为我想查看快速信号的细节。现在我使用触屏菜单激活通道1(CH1)。信号的幅值约为4.5V,所以我选择1V/div 量程。这里连接了一个10:1的探头,所以我把探头衰减比保留在10:1。我还可以设置其他选项,但这些是最重要的设置。现在就可以开始测量了。
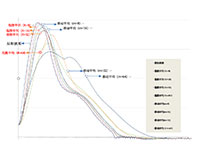
我们可以看到,PWM信号随着机器人旋转臂的位置而变化。DL350的特别之处在于可以快速地分析信号。现在我回到菜单,激活测量(MEASURE)功能。在测量设置中,可以找到各种可独立选择的参数选项。这次我选择了振幅、占空比和脉冲计数。当关闭菜单后,就可立即看到所选测量值显示在屏幕的底部。
为了获得波形细节,我可以用两根手指放大曲线,清楚地查看脉冲宽度随旋转角度的变化。这样,用户就可以快速发现诸如脉冲宽度中的故障或错误之类的异常,还可以同时观察电压的情况。
一旦测量完成,停止测量,它就会显示另一个特殊的特性。DL350自动将数据存储在历史存储器中,这样就可以进一步分析记录的波形。我可以通过 菜单->分析->历史 调用这个功能。下面显示保存的波形总数。
现在我可以分别回放每个波形,一次可显示最多1,000条或指定数量的波形记录。我同时选择了最后的20屏波形。在列表视图中,记录按时间顺序存储,可以从那里直接访问。