中国科学技术大学工程科学学院、人形机器人研究院董二宝副教授课题组联合香港城市大学于欣格副教授团队,于11月15日在国际著名期刊《国家科学评论》(National Science Review)上在线发表了题为“A tactile perception method with flexible grating structural color”的研究论文。该研究工作提出了一种基于柔性光栅结构色的触觉感知新方法,在触觉传感器的触点定位分辨率和力识别精度等综合性能上实现了重要突破,展现出广阔的应用前景。
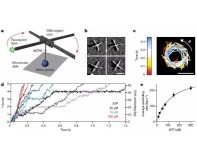
触觉传感器是机器人执行复杂精细操作的关键核心部件之一。近年来,随着机器视觉技术的快速发展,基于视觉识别原理的触觉传感器(也被称为视触觉传感器)成为触觉感知领域的重要研究方向。然而,现有的视触觉传感器主要依赖几何光学信息或标记跟踪技术,其触点力位识别感知的分辨率和精度受到了严重制约。针对这一难题,研究团队受仿生结构色现象的启发,创新性地采用柔性光栅薄膜在白光照射下形成的结构色图案作为触觉表征信息,并结合深度学习算法进行数据处理,实现了接触点的高灵敏、高分辨率感知。实验结果表明,这种基于柔性光栅结构色的视触觉感知方法能够充分利用结构色图案中蕴含的丰富触觉表征信息,在触点定位的空间分辨率和法向力识别精度方面显著优于当前的视触觉感知技术,并在综合性能上取得了突破性提升。

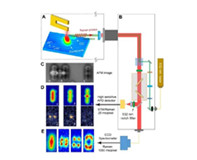
图1.基于柔性光栅结构色的触觉感知方法示意图
此外,基于柔性光栅结构色的触觉感知方法展现了卓越的可拓展适用性。研究团队基于核心组件的模块化设计,进一步开发了面向三种典型场景应用的传感器原型:一款高灵敏度振动传感器,能够精准检测低频振动信号;一款仿生触须传感器,能够灵敏感知低频振动和气流扰动;以及一套具备环向三维接触感知能力的内窥镜触觉传感系统。实验进一步验证了该触觉感知方法在机器人感知、环境监测和医疗器械等领域的广泛应用潜力,为智能感知技术的发展提供了全新的研究思路和技术途径。

图2.该触觉感知方法的扩展应用原型示例
中国科学技术大学工程科学学院精密机械与精密仪器系博士生邱宇泽为论文第一作者,中国科学技术大学董二宝副教授和香港城市大学于欣格副教授为论文通讯作者,中国科学技术大学张世武教授和郑津津教授为论文共同作者。该研究工作得到国家自然科学基金、中央高校基本科研业务费等项目支持。
论文链接:https://academic.oup.com/nsr/advance-article/doi/10.1093/nsr/nwae413/7901371