无论是数码照相机还是激光雷达传感器,进光量都是“底大一级压死人”,但车用激光雷达无论是成本还是体积都非常受限,一味比谁底大并不是最优的解决方案。而SPAD方案的兴起,让传感器厂商找到了进光量不足的另一路径。
如果进光量不足,加上有干扰光线进入,激光雷达传感器所成的像就会出现噪点。对于人类而言,一张照片中出现噪点,能通过智慧将噪点内容“脑补”齐全。因此为激光雷达传感器单独配备一颗AI芯片,用于噪点、干扰光线处理就是路径之一。不过,每经过一次处理,都会产生一定时延,如果低时延的优势被慢慢磨去,自动驾驶的安全性就会降低。
加入AI芯片做信号预处理虽然简单,但实际表现可能并不完美。
因此,如果能用微弱的进光量“代表”其他光成像,不但能实现更低的延迟,而且通过成像能得到噪点更少的点云图。
韩国科学技术研究院(KIST)新一代半导体研究所所长张畯然在一篇文章中阐述了SPAD传感器的工作原理。

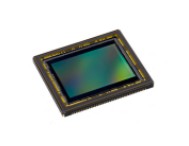
▲不同类型图像传感器在接受光子照射时电子放大程度
“当在SPAD上施加比击穿电压(breakdown voltage)更高的电压时,会发生碰撞电离现象(Impact Ionization),巨大的电场(electric field)使载流子(carrier)加速运动并与原子碰撞,从而使原子中释放的自由载流子数量急速增多。这种现象被称为雪崩倍增(Avalanche Multiplication),会导致图像传感器点亮的光子产生大量自由载流子。”他写道。
这就意味着即便激光发射单元发射的激光仅有少量反射回来,通过雪崩倍增现象传感器仍旧能够将光子大量增加,并且识别为大量的光子。这就意味着,SPAD传感器具有非常高的信噪比。
同时,SPAD在接收的光子数量极少的情况下就能完成成像,因此其“快门速度”可以做到非常短,提升感知帧率。
2.双层芯片架构 响应速度远超现有产品
索尼除了将SPAD技术逐步推向量产之外,也使用了已经打磨多年的一项技术——双层图像传感器堆叠,这项技术能够让感知响应速度更快。
在去年2月的一次演讲中,索尼半导体公司高级经理Oichi Kumagai对SPAD激光雷达传感器的技术路线进行了详细介绍。

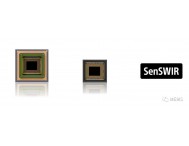
▲索尼IMX459结构和单个SPAD传感器
其中,逻辑电路放置在芯片底部,每一个像素尺寸为10微米*10微米。传感器表面并非完全平整,索尼将每一个像素点做成了一个凸透镜,从而能够实现更高的光折射率,提升激光的吸收效果。根据索尼的测试,这一激光雷达传感器在使用905nm波长的激光光源时,光子检测效率能达到24%。

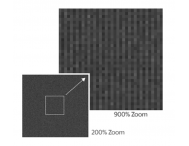
▲传统激光雷达传感器点云图(左)SPAD传感器点云图(右)
此外,由于每一个SPAD像素都能与下方逻辑电路通过铜-铜(Cu-Cu)组件连接起来,因此只要光子进入SPAD,就能经过雪崩进入逻辑电路。从感知到光子,到完成数字信号转换,整个过程只需要6纳秒,这一表现非常出色。索尼开发了数字时间转换器(TDC),直接能够将光子飞行时间转换为数值,不需要二次计算。

▲索尼IMX459光信号转换电信号仅需6ns
国内MEMS激光雷达厂商一径科技的一位产品经理谈到,现在市面上其他技术路线的激光雷达接收传感器的延迟已经能做到比较低,从感知到生成深度数据,基本需要百纳秒到几微秒之间。
然而,索尼的IMX459则是更进一步,相比此前最优秀的产品,也有大幅提升。
IMX459采用直接飞行时间(D-ToF)的方式测距,张畯然在其文章中说道,当光子进入时,SPAD阵列会发射数字脉冲(Digital Pulse),因此更容易跟踪光飞时间。不仅如此,SPAD还能捕捉精确的时差,因此具有精确的深度分辨率(depth resolution),精确程度甚至可以达到毫米级别。