毫米波雷达很热。雷达的分辨率越来越高,现在也可以分类物体,这是以前做不到的。
然而,更好的分辨率需要更多的通道,这意味着更多的数据需要处理。所以毫米波雷达需要有专门的处理器来处理这些数据,产生物体或者点云,此外,毫米波雷达需要有开发工具来搭建应用。否则,这些数据很难被理解。
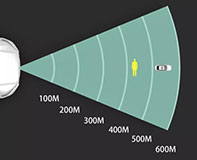
雷达除了能全天候工作外,往往会受到负面评价。传统的汽车雷达看不到摄像头或激光雷达所能看到的物体。更具体地说,雷达看不到遥远的物体,不能辨别它们看到的东西。它们的处理速度不足以达到高速公路的要求。
模拟波束成形
2017年1月成立的创业公司metawave,希望通过开发模拟波束成形技术来改变这种状况。
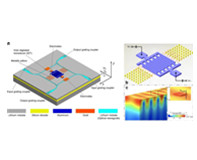
利用PARC将超材料、雷达和天线商业化的独家授权,metawave推出了该公司“全套雷达套件”的原型。该公司的超材料是布置在PCB板上的小型软件控制工程结构。据称,这些结构能够以特殊的方式控制电磁波束,这在以前通常只有在体积大得多、更强大和成本更高的军用系统中才能实现。
metawave的模拟雷达技术是基于电子可控天线。它使用一根带有两个端口的天线:一个端口连接到Tx或Rx链路,另一个连接到MCU。MCU通过查找表来定义和控制天线波束宽度和方向,从而使metawave的模拟雷达能够实现微秒级速度的扫描。

metawave的全套雷达套件是雷达芯片不可知的。该公司宣称其基于超材料的模拟波束成形技术可以精确控制雷达波束,在不牺牲分辨率的情况下实现更快的工作速度和更好的信噪比。
面向机器使用的成像数据
尽管Mobileye仍然是汽车视觉领域的领导者,
任何人都可以获得相同的成像器,构建适合于图像识别的摄像头。但问题是你需要合适的处理器和紧密集成的算法。
对此,现在你也可以从几家芯片公司中的任何一家选择一款高性能视觉处理器,并应用自己的算法。或者,你也可以用CNN(卷积神经网络)来完成这项工作。
目前,自动驾驶汽车的制造商在摄像头方面有了选择。许多公司会将AI应用于图像来获得结果。
Chronocam。这家总部位于巴黎的创业公司的传感器技术不是面向人类使用,而是面向机器传感和检测设计;该公司认为,这项技术可以彻底改变当今CMOS图像传感器市场。Chronocam的事件驱动传感器还很新,尚未在任何商用车上使用,但这项技术正受到关注。例如,雷诺集团于2016年底与Chronocam达成了战略发展协议。
英特尔、Nvidia等GPU/CPU领域的大公司仍在试图找出更准确、更快速处理大量数据的最佳方式。然而,Chronocam专注的是针对机器应用简化和定制的成像数据采集。事件驱动传感器的目标是显著减少数据负载,使汽车几乎可以做出实时决策。
定位使汽车具有“自我意识”的第一步是地图构建,而与汽车在预先制作的地图上看到的内容进行实时匹配。然后,汽车可以对其位置进行三角测量和定位。汽车必须确切知道它必须去哪里,以便它可以发展“情境感知。
换句话说,如果希望高度自动化的车辆能准确定位,它们需要激光雷达,需要一个具有定位资产的基本地图,对此没有任何东西可以替代激光雷达。
但是,还有其他方法可以做到这一点。例如,Nvidia的DriveWorksSDK可以实现基于图像的定位。DriveWorks的库包括地图定位、高清地图接口以及自我运动。
实时动态定位(RTK)是另一种选择,RTK可增强来自全球导航卫星系统(如GPS、GLONASS、伽利略和北斗)的位置数据的精度。与此同时,英特尔/Mobileye正在推广其面向定位的道路体验管理(REM)技术。Mobileye希望通过利用基于摄像头的ADAS系统的涌现,利用人群的力量来准实时地建立和维护一个精确的环境地图。
初创企业在定位方面也有发挥的空间。据悉,初创公司DeepMap正在为第4/第5级自动驾驶汽车解决高清地图构建和定位以及大数据管理方面的挑战。DeepMap正在通过使用摄像头图像和激光雷达数据来改进当前的数字地图。
传感器融合
随着自动驾驶汽车收集到所有的传感数据,最重要的就是传感器融合的质量。传感器融合的结果决定了自动驾驶汽车的决策和行为,也即安全问题。
自动驾驶汽车仅采用一个传感器不可能实现可靠驾驶,因此必须进行传感器融合。如果必须同步所有传感器信号,所以融合是很难的。
而关于是融合“对象”数据还是“原始”数据,业界的争论才刚刚开始。目前没有明确的答案。
与对象数据相比,由于原始数据在转换中没有任何东西丢失,AI的大多数支持者更喜欢融合这种数据。与原始数据融合有关的问题包括:你将需要大量的处理;你还需要有GB大小的网络来将这些信号传送到整个车辆中。