相应的输出结果为

典型案例
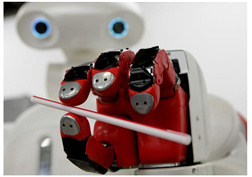
一、金属件组装案例
项目需求是机械手盲抓“金属片”,然后到相机上方拍照,MicroMatch智能相机拍照后控制机械手将金属零件放到指定位置。项目需要组装5片不同的“金属零件“,为了加快速度用了两台机器人和两台MicroMatch智能相机,一个台组装2片,另外一台组装3片。由于抓取的5片产品都不一样,相应的放置位置也不同。由于MicroMatch智能相机具有多逻辑的处理功能,通过简单设置,就可以由一台智能相机控制机械手分别抓取”不同“的产品放置到”不同“的目标位置。
(方案实施现场)
1、 使用自动化方法完成镜头畸变校正和手眼标定;
2、 使用MicroMatch软件的算法组态功能,提取产品特征点坐标;
由于设计多逻辑控制,组态算法读取机械手指令后进行逻辑判断,根据指令执行不同的算法。
3、 计算产品旋转角度;
4、 机械手旋转补偿;
5、 构建机械手通信协议;
6、 串口输出控制机械手动作;
(算法流程图)
MicroMatch智能相机系统除了支持任意编辑算法流程外,还可以自定义发布界面,交付的项目界面如下

(组态界面)
二、高精度贴合案例
项目背景是屏幕的高精度贴合,机器人贴合精度要求6u,方案采用双相机拍摄对角的方式提高精度。由于需要双相机合作,需要将一个相机的数据发送给另外一个相机,另外一台相机收到数据后计算出最终结果控制机械手。

1、 相机A控制程序
相机A获取手机两条边,然后计算两条边的交点,然后再使用“发送消息”模块将坐标点发送给相机B
2、 相机B控制程序