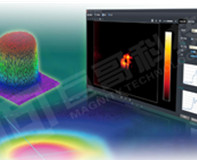
图3 热成像输出CVBS模拟视频图
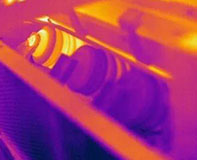
除此以外,在智能监测机器人上安装FLIR热像仪,还可以提高系统的安全可靠性。FLIR热像仪将日常巡视、夜间红外巡视、重点设备巡视和特殊巡视相结合,利用多传感信息融合定位技术,结合电子地图与路径规划完成整个机器人运动导航,准确获取设备状态和表计信息,提高视频分析的精度和可靠性。
4、智能监测机器人应用案例的电磁兼容
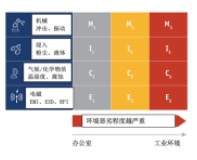
4.1) 高电压试验的干扰源
弱电仪器邻近的条件下工作,存在着严重的 “电磁兼容(EMC”问题。电磁兼容是指电子没备在它所处电磁环境中能令人满意地工作。作为干扰源只具有可允许的干扰发射能力;作为感受器時,对于干扰具有可允许的敏感度。在高电测量条件下,在現场有高电压大电流的各种电气设备和导线;在实验室有高电压大电流的发生装置。弱电仪器在上述条件下工作,最严重的状况是弱电仪器由于地电位升高而引起“反击”或由于强电磁干扰造成个别关键元件损坏,以致弱电仪器无法正常工作;较为严重的状况是弱电仪器由于地电位升高而引起“反击”或由于强电磁干扰影晌,以致弱电仪器记录信号严重失真。
电磁干扰源:
1.由于测量用的射频同轴电缆外皮中通过瞬态电流引起的干扰;
2.间隙放电時产生的空间电磁辐射;
3. 弱电仪器电源线引入的干扰。
为弱电仪,建一个小屏蔽室或屏蔽盒。它们用金属板焊成,或网双层屏蔽网构成。
4.2)智能监测机器人要抗干扰
高电压试验抗干扰综合措施原理图如图4。

图4 高电压试验抗干扰综合措施原理图
4.3 )智能监测机器人的工艺结构和抗干扰综合措施如图5。

图5 智能监测机器人的工艺结构和抗干扰综合措施
5、智能监测机器人应用案例的工作过程
智能监测机器人应用案例的工作过程如图6。

图6 智能监测机器人应用案例的工作过程
高电压试验大厅试验信息,传送到控制室智能终端,再到传送检测中心智能终端,最后将其结果显示在子屏上。
用于高电压试验大厅监测的机器人如图7

图7 智能监测机器人
传送到高电压试验大厅控制室智能终端的CVBS模拟视频