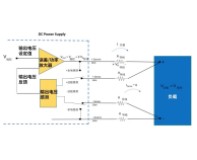
图3中网络标识符说明:Uref电压环给定值,Udc为母线电压反馈值,ΔV为正负母线电压差;Sign(v*i)为三相调制波分别和该相电流乘积正负符号;Va、Vb、Vc为三相调制波;Sa1~Sc4为驱动信号;Pset和Qset为有功功率和无功功率设置值;ADE指电能芯片负载输出有功和无功采样并传送给控制芯片,用于限功率控制;id_island\iq_island为孤岛扰动给定;id_dc\iq_dc为直流分量控制给定;idr和iqr为限功率控制后的电流环dq给定;idf和iqf为电感电流反馈dq值;wL为电流d值和q值之间的解耦系数(w为角速度);ud和uq为电压前馈dq值;uqr为锁相环给定值。
1.3 双向馈能控制逻辑
定义:Urec_start为大整流启动电压(1300V~1500V可设置);Urec_stop为大整流停止电压(1500V~1550V可设置);Uinv_stop代表大逆变停止电压(也叫馈能停止电压,1550~1650V可设置);Uinv_start表示大逆变启动电压(也叫馈能启动电压,1650~1950V可设置);Uref为电压环给定值(1500~1600V可设置)。
正常运行过程中,如
Urec_start=1450V;Urec_stop=1500V;Uref=1500V;Uinv_stop=1550V;Uinv_start=1650V,牵引网过压保护点2100V,欠压保护点1320V,能量流向与牵引网电压关系曲线如图4所示。
馈能启动后,电流达到额定电流时间设置300~500ms,根据现场工况设置,各启动、停止点电压的检测滤波时间均为10ms。

1.4 逆变馈能控制策略
1.4.1 改进数字锁相环
基于d-q变换的改进数字锁相环如图5所示,DSP先对三相电压采样值ua(k)、ub(k)和uc(k)进行3s/2s变换处理得到uα和uβ,按等功率Clarke变换可得三相电压在两相静止坐标系下正序分量[12]:


其中,正序分量可由电网通过数学变换、移相得到:实轴部分通过50Hz带通滤波器G0(s),滤除其他各次谐波;虚轴部分通过50Hz移相滤波器G90(s)进行90°滞后相位,同时滤除高频干扰。

按照采样频率1.5kHz,双线性z变换方法,对以上传递函数离散化处理可得:

由(1)关系得到式(3)数字滤波器,对uα和uβ分别移相、滤波和换算得到uα+和uβ+;对uα+和uβ+进行2s/2r变换处理得到uqr(k)和udr(k)。uqr(k)作为锁相环给定值其反馈值始终设置为0,通过PI控制器得到频率值加上内部基准频率(50Hz)即可做为实时跟踪频率;已知开关频率fs积分求得实时的相位角θ,而sin(θ)和cos(θ)既是内部闭环信号,也作为三相电压d-q反变换的基准信号。
1.4.2 中点电位平衡控制
空间电压矢量脉宽调制(SVPWM)算法在三电平逆变器中包含27种开关状态、19个电压矢量,按照传统方式实现三电平SVPWM调制需要使用大量条件判断,占用较多CPU资源且逻辑复杂。
SVPWM本质上可以看作是正弦波叠加零序分量,并采用中心对称规则采样的载波调制。且叠加零序分量的载波调制(CBPWM)并不需要如同SVPWM方法进行大量数学运算,因此采用叠加零序分量的载波调制。SVPWM等效的CB-PWM叠加的零序分量Vzero为:

Va,Vb,Vc为三相正弦调制波,max()为取最大值函数,min()为取最小值函数。