SVPWM调制三电平对母线电容充放电时,使中点电位偏移。采用SVPWM方法,通过分配流入中点电流相反的冗余小矢量的作用时间来控制中点电位平衡。CB-PWM同样可叠加零序分量来控制中点电位,根据载波及电流方向,判断出所需注入零序分量方向,控制框图如图6所示。

1.5 电压、电流环及限功率控制算法
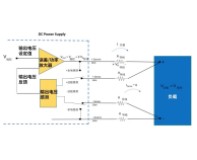
图7给出了系统电压控制示意图,电压环使用PI控制器,令母线电压跟随电压给定值Uref,电压环输出作为电流环的给定值。电压闭环给定值分两种:缓启动给定值和正常运行给定值、稳压馈能和牵引网模式。稳压馈能和牵引网模式适用于调试阶段使用。

缓启动:母线电压从0V开始由辅助接触器吸合缓冲,再由主接触器吸合缓冲,最后启动反向整流跟踪牵引网电压。
正常运行:电压环给定 1500V~1600V可设置,正常情况下牵引网电压高于停止电压且低于启动电压(1650V~1950V可设)。本系统对电压环的PI输出会做相应限幅处理,满足现场应用需求:当牵引网电压在启动电压和停止电压之间时,通过限制电压环输出限幅值来禁止逆变馈能,允许反向整流。当列车制动引起电压抬升到启动电压及以上,通过放开电压环限幅来启动逆变馈能,并在电压重新下降到停止电压时禁止逆变馈能。
地铁现场要求牵引网电压大于启动电压后馈网功率从0到额定功率所需时间300ms~500ms,为保证馈网功率变化速率可控,对电压环PI输出进行限幅。PI限幅按固定步长递增或递减,步长根据设置的满载馈能响应时间Tr、系统开关频率fs以及额定电流Ir换算,电压环PI输出限幅变化步长为:

电压环PI系数选择必须满足现场需求,积分环作用快慢跟Ki系数、启动电压和停止电压均有关系。以最小的启动电压1650V,最高的电压环给定1600V为计算依据,只要保证电压环PI输出变化速率大于300ms满载馈能响应时间对应的限幅变化步长Istep(300ms)=(1111.0/(1500*0.3))=2.47即可。
图8给出了三相并网电流控制框图,由电压给定经过电压PI调节器的输出加上有功设置值Pset限幅后作为电流d值给定,同理电流q值给定由系统设置的无功Qset值决定;idf和iqf为电感电流反馈dq值,通过wL解耦系数进行解耦控制;电流环PI控制器输出后叠加电网电压前馈ud和uq,以提高系统对电网波动的抗扰性。

功率控制环实现输出期望的功率,便于测试不同功率段性能指标。功率控制环是根据地铁工况设置的功率对并网电流进行闭环限幅,使输出功率精度满足要求1%。有功、无功电流限幅式子如下:


式中,Pset、Qset为用户设置的有功功率和无功功率,Ppi_out、Qpi_out为电能芯片ADE7878实时计算的功率闭环调节输出,Ug为电网线电压有效值,限功率控制环路框图如下: