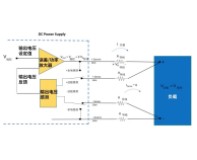
由上图可知,电流环限幅主要由Pset/Ug和 Qset/Ug决定,限功率环PI控制器起到微调作用。在电感电流采样准确、滤波电容无功补偿准确的情况下,限功率控制环PI控制器输出为0,电流限幅直接等于Pset/Ug和Qset/Ug。
实际因电感电流采样偏差、无功补偿不到位,就需要PI控制器对电流限幅进行微调,ADE7878作为电能计量芯片,具备较高的采样精度,因此可用于校正功率。
2 实验结果与分析
为验证所提出的控制方法,研制了一台峰值功率变换2MW、适用于2MW制动能量地铁机组的双馈变流设备,逆变并网试验波形如图10所示。

其中通道4为并网AB线电压900V,通道1~3分别为A、B、C三相电流,此时逆变馈网总功率为2MW。
地铁制动馈能实际工况过程如图11(a)所示,设置整流启动电压Urec_start=1450V、整流停止电压 Urec_stop=1500V、电压环电压给定值Uref=1500V、馈能启动电压Uinv_start=1650V,馈能停止电压 Uinv_stop=1550V。中通道1为牵引网电压,通道3为A相输出电流,地铁制动馈网能量为2WM。
图11地铁制动能量回馈动态过程 :

(a) 地铁制动及牵引网电压平衡动态过程

(b) 大逆变馈能启动过程

(c) 大逆变停止过程
图11(b)当牵引网电压逐渐抬升到1650V后输出电流在300ms内递增到1WM制动满载电流,变流器实现逆变馈能。
图11(c)当牵引网电压逐渐下降到1550V时,大逆变停止,输出电流幅值逐渐减小,因大逆变停止的限幅渐变速度较慢,电流减小速度明显小于递增速度。当牵引网电压继续跌落到大整流启动点1450V时,大整流启动。
因电压环退积分速度和输出限幅,装置需要一段时间才能转入整流状态。牵引网电压逐渐恢复到大整流停止点以上,大整流停止,整流电流逐渐递减至小整流电流值,维持牵引网电压平衡。
为验证限功率控制功能,分别测试不同Pset、Qset以及PF设置值对应功率分析仪WT1800测量的实际值,并计算偏差量。如下表1~表3。

表1 Pset设置值与实测值对比

表2 Qset设置值与实测值对比

综合以上实验数据可知通过限功率控制可使输出有功功率、无功功率以及PF控制在预期精度内,以满足设计需求。
3 结论
依据2MW地铁制动能量回馈实际工况,给出了一种地铁制动能量回馈控策略及控制时序方案,并在一台额定功率1MW(峰值功率2MW)的双馈变流装置得到验证,提出的方法可有效回馈轨道交通的制动能量。