1) 如果不进行测试,我们无法预知智能车的行为表现。所以,在没有测试之前,我们也无法确认哪些测试任务更加的具有挑战性。所以我们需要通过不断的测试,取样,执行,分析这样一个循环来达到最优的测试效果。
2) 测试本身就是一个自我标定的自循环过程,我们必须根据测试结果来判定车辆的智能性。
3) 如果测试要覆盖所有的智能车的功能所需要的资源是巨大无比的,所以,我们需要一些更优的方法和工具来缩短这个过程。
3.3. 平行测试
3.3.1. 传统虚拟仿真
目前很多研究人员都把更多的精力放在视觉领域的虚拟仿真,当然,也有人开始注意到驾驶员行为的重要性。在视觉领域的仿真中,有以下几种图像注入方式:1.采集真实的2D数据,然后基于该数据建立3D模型,再在此3D模型的基础上上投影成2D的图像注入智能车的感知系统;2.使用对抗式网络生成新的2D模型注入; 3.基于以上两种方法尽可能多的图像注入。
3.3.2. 平行测试方法
我们这里提出一种新型的虚实结合的智能车平行测试方法。如图7所示,车辆智能性测试可以分为三步:测试环境,测试规划和测试执行。同样,我们在虚拟世界里也能够建立一一映射的测试流程。

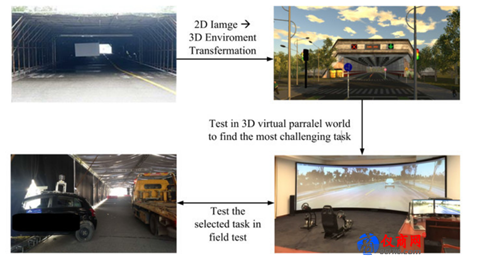
图7. 平行测试方法
1) 首先在真实环境下建立有多种交通元素(十字路口,交通灯)的场景,对应的在虚拟空间内,根据不同的测试目标,可以把该场景细分成不同的任务,功能团,单个功能;
2) 基于这种分解模式,可以建立相应的测试计划来有针对性的测试不同的功能。例如假设我们要测试交通标示识别和变道这两个功能团,很容易发现,交通标示识别重要性没有那么高,而测试变道能更好的提升车辆的可靠性。在测算了场景中包含的任务,以及任务中包含的功能团之后,我们能选出包含更多的变道的任务来在真实环境中进行测试,而包含更多交通标志识别的任务可以在仿真环境中进行测试;
3) 一旦制订了在真实和虚拟环境中的测试计划,按照计划执行之后对测试结果可信度以及功能重要性进行加权就能得到相应的加权分数。同时,在真实环境中得到的测试数据又能注入仿真环境,通过这种方式,仿真环境能够不断更新加强。真实环境和虚拟环境中的测试是异步的,我们可以在真实环境进行某一项测试的同时,在虚拟环境中进行多项测试。
和传动的仿真测试环境相比,平行测试体系有如下两个不同。
1. 平行的虚拟环境不仅仅是真实环境的一一映射,同时也和真实环境在状态上存在交互,真实环境会影响虚拟环境,虚拟环境也会影响真实环境,这样就形成了一个自我不断增强系统;
2.平行系统是一种自我学习的系统,一些在虚拟环境中的关键元素是数据驱动型,这使得平行系统比那些基于随机模型的系统要更加自动化,可信度也更高。
3.3.3. 平行测试实际应用
在江苏省常熟市,这样一个平行测试系统已经建立起来,并且很好的支持了2017年中国智能车未来挑战赛。如图8所示,我们先在虚拟环境中找到最具挑战性的测试任务然后再在真实环境中进行测试。

图8. 平行测试实际应用
4. 智能性测试的相关讨论
4.1. 伦理道德问题