ADI的高性能固态激光雷达方案
对于汽车来说,激光雷达最好是固态的激光雷达。所谓的固态即没有旋转部件,完全通过半导体的方案来制造不同的探测角度。这对于面对抵抗震动等环境的稳定性会更好,也是ADI注重的一个发展方向(ADI曾成功收购一家领先的固态激光波束转向技术企业)。
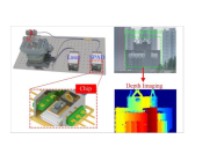
而在中短距离上,ADI则会提供ToF摄像头技术,即所谓的景深摄像头,其背后也是激光技术,会有主动光源,按照主动光源反射的时间来计算出障碍物景深信息。以ADI开发的AD-96TOF1-EBZ深度感知硬件平台为例,该解决方案能够实现非常小巧和低功耗的特点,测量长达6米的深度,并具有出色的室外和室内性能以及VGA分辨率。

AD-96TOF1-EBZ深度感知硬件平台
此外,惯性导航MEMS方案在自动驾驶方面同样是非常重要的。这类方案应用于GPS信号不佳,比如隧道这种可能长时间没有GPS信号的场景,这种场景下还是会需要相应的导航信息,惯性导航此时作为补充用于描摹行驶轨迹。这种导航信息就需要来自惯性导航的芯片持续给基于车的转向或者车的加速度、减速度,来知道车的具体位置。

ADI的汽车级惯性导航MEMS方案
在这方面,ADI惯性导航相应的芯片是基于原来在民航飞行器中的很多经验,进而转化成汽车应用的,与传统地从手机消费类提升到汽车应用的方案不同,可靠度和精度都会更高。目前来看,哪怕是长里程(超过十公里)的行驶过程中,也能通过惯导相应的算法和技术把车的位置信息更新在车道里,给到基于高清地图的自动驾驶场景下惯导位置的导航支持。

ADI在live worx19上展示的惯性导航方案
ADI在live worx19上展示了一款精密惯性MEMS自主导航和监控方案,其使用的ADIS16495 6自由度惯性测量单元是一款高精度战术级和近战术级惯性测量单元。它由惯性传感器组成,包括3个线性加速轴,3个额定输出轴,以及一个陀螺仪,其可以根据现场信息以及车辆自主信息来确定车辆本身的行驶轨迹(哪怕是当车辆的其他传感器出现故障时,依然不影响车辆导航)。
总结
传感器的重要性对于自动驾驶的发展已经不言而喻,然而跟传感技术一样重要的则是它们的可靠性。如果传感器本身不可靠,输出的信号没有被准确捕获以作为高精度数据提供给上游,那么这些关键的传感器将变得毫无意义。ADI公司围绕惯性导航、高性能雷达和激光雷达等领域长达数十年的深厚积累可以使数据质量得到可靠保证,力求各种传感器融合方法和人工智能算法做出最佳响应,从而加快我们迈向自动驾驶的步伐。