不管是在自动驾驶汽车上还是嵌入在最新的小工具中,光检测和测距(激光雷达)系统都可能在我们的技术未来中发挥重要作用,使车辆能够实时“查看”手机地图三维图像并增强视频游戏中的增强现实。但是目前面临一些挑战:这些3D成像系统可能体积庞大,昂贵且难以缩小到这些新兴应用所需的尺寸。

但是科罗拉多大学博尔德分校的研究人员离解决方案又迈出了一大步。在Optica上发表的一篇新论文中,他们描述了一种新的硅芯片-无活动部件或电子设备-可以提高激光雷达系统所需的分辨率和扫描速度。
该研究的主要作者内森·多斯达恩(Nathan Dostart)表示:“我们正在寻求用这种扁平的小芯片来理想地取代笨重的大型激光雷达系统。”
当前的商用激光雷达系统使用大的旋转镜来操纵激光束,从而产生3D图像。在过去的三年中,Dostart和他的同事一直在研究一种新的转向激光束的方法,称为波长转向-该方法将激光的每个波长或“颜色”都指向一个唯一的角度。
他们不仅开发了一种同时沿两个维度进行此版本的方法,而且不仅开发了一种方法,而且还使用“彩虹”图案拍摄3D图像,从而实现了彩色化。由于只需更改颜色即可轻松控制光束,因此可以同时控制多个相控阵以创建更大的光圈和更高分辨率的图像。
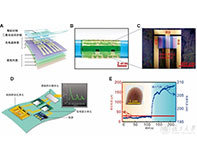
这项新研究的合著者,电气和计算机工程学教授凯尔文·瓦格纳说:“我们已经找到了如何将二维彩虹放入一个很小的芯片中的方法。”
电气通讯的终结
无人驾驶汽车目前是一个价值500亿美元的产业,预计到2026年其价值将超过5,000亿美元。尽管当今道路上的许多汽车已经具有一些自动驾驶辅助功能,例如增强的巡航控制和自动车道居中,但真正的竞赛就是要创造一种无需驾驶员亲自输入也不负责的自动驾驶汽车。在过去的15年左右的时间里,创新者已经意识到,要做到这一点,汽车将不仅需要照相机和雷达,还需要激光雷达。

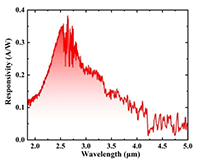
通过波长控制的硅光子光学相控阵解决的光栅扫描图案。该图案的弯曲是片上波导系统中色散的指标。图片来源:Nathan Dostart
激光雷达是一种遥感方法,它使用激光束(不可见光脉冲)来测量距离。这些光束从其路径上的所有物体反射回来,并且传感器收集这些反射,以实时创建周围环境的精确三维图像。
激光雷达就像是光的回声定位:它可以告诉您图像中每个像素的距离。它已经在卫星和飞机上使用了至少50年,用于进行大气感应并测量水体的深度和地形的高度。
尽管在激光雷达系统的尺寸上取得了长足的进步,但到目前为止,它们仍然是自动驾驶汽车中最昂贵的部分-每辆汽车的价格高达7万美元。
为了有一天在消费市场上广泛工作,激光雷达必须变得更便宜,更小且更简单。一些公司正在尝试使用硅光子学来实现这一壮举:电气工程领域的新兴领域,它使用可以处理光的硅芯片。
该研究小组的新发现是用于激光雷达系统的硅芯片技术的重要进步。
波士顿大学工程合著者兼副教授米洛什·波波维奇(MilošPopović)表示:“电子通信已达到极限,光学必须发挥作用,这就是所有这些大公司都致力于使硅光子技术在工业上可行的原因。”
这些硅芯片可以制造得更简单,更小,同时保持其成像的高分辨率和准确性,并且可以应用更多的技术,包括自动驾驶汽车和智能手机。
有传言称,即将面世的iPhone 12将采用激光雷达相机,就像iPad Pro中的相机一样。这项技术不仅可以提高面部识别的安全性,而且有一天可以帮助创建攀登路线图,测量距离甚至识别动物的踪迹或植物。
Dostart表示:“我们正在提出一种使用芯片技术的激光雷达可扩展方法。这是该方法的第一步,也是其第一步,还有很长的路要走。”