什么是高精度地图
高精度地图,不仅仅是电子导航地图。二者之间有完全不同维度的意义。我们在日常生活中使用的电子导航地图,是给我们驾驶员指引方向的;而高精度地图,则是给未来自动驾驶汽车指引方向的。高精地图,拥有精确的车辆位置信息和丰富的道路元素数据信息,起到构建类似于人脑对于空间的整体记忆与认知的功能,可以帮助汽车预知路面复杂信息,如坡度、曲率、航向等,更好地规避潜在的风险。是实现自动驾驶的关键所在。
高精度地图是超越目前所有传感器感知范围的存在,其感知范围可以遍布多个街区。是自动驾驶汽车的千里眼,不但可帮助自动驾驶汽车提前知晓位置信息,还能精确规划行驶路线。同时,高精度地图不受雨雪天气影响,无论天气影响多么恶劣,依然能够精确定位自动驾驶汽车,及时反馈数据,做到传感器冗余。高精度地图在每一次迭代更新后,都能收录新增的交通标志、地面标志、车道线、信号灯等。从而帮助自动驾驶汽车在行驶过程中精确识别。车辆可依照高精地图已知的道路信息,提前做出准确判断和决策,且不受阴雨等天气影响,减少车祸的发生,为实现自动驾驶保驾护航。
高精度地图在自动驾驶中的作用

辅助环境感知
目前,高精度地图在自动驾驶汽车中能够起到辅助环境感知的作用。即给其他传感器位置信息,前方道路信息以及交通状况信息。提供额外的冗余感知,即使车辆在经过隧道或者遭遇暴雨沙尘飞雪等天气,依然保持良好的监测和外界通讯能力。最后,能够提供先验信息给其他传感器。有助于提取感知的ROI(感兴趣区域),提高感知效率。
路径规划与决策
由于高精度地图的感知范围超广,所以有能力提前告知自动驾驶系统一些先验信息,帮助自动驾驶系统做出正确的路径规划和决策。比如前方路段突然有施工,那么高精度地图感知后,反馈给车辆。车辆可以选择避让而走另一条道路。
确定车辆精确位置
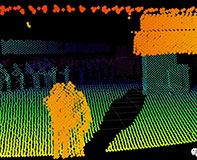
高精度地图对于路面的几何结构,车道线,重大地标物等都有详细的三维表征,并且能够存储为结构化数据。当汽车的LiDAR、GPS、摄像头获取详细信息后,可以与这些结构化数据进行对比,从而推理出自动驾驶汽车的精确位置。
高精度地图面临的几大困境

市场节奏,传感器的局限,投入产出不平衡,测绘政策并不是主要阻碍因素。
市场节奏
目前市场上大多数的自动驾驶应用还停留在L2级别,只有少量的L3应用。HWP,TJP,AVP从2018年就乐观的提出,很快落地能够实现,但是如今,2020年走了四分之三了,也没有大量落地。现实情况仍然是L2应用多,L3少量。这样的市场形势决定了摄像头和毫米波雷达仍然是汽车应用的主流传感器。
摄像头应用于定位仍是主流
目前的自动驾驶解决方案中,基本默认摄像头用于定位。算法也是围绕此来写。因此,高精度地图还很难做到颠覆性的成为定位主要传感器。
高精度地图投入收入不平衡
想要做高精度地图研发,至少需要配备12辆车、100人团队、50人以上研发团队,研发成本最少一年几千万。在如此高额的投入下,回报却很少。因为目前高精度地图应用在自动驾驶汽车中还是很少的,国内OEM向图商订购的订单量也很少,仅仅覆盖预研项目的车辆。
(虹科自动驾驶团队 文案:Ale)