近日,天津大学微电子学院智能系统与纳米工程实验室、天津大学小护士可穿戴技术联合实验室联合美国芝加哥大学团队,成功研发出一种对拉伸形变不敏感的可拉伸压力传感器。该成果有效解决了柔性压力传感器因拉伸形变造成测试噪声的难题。

无论是元宇宙中真实世界与虚拟世界的交互,还是智能医疗中更加仿生的机器人,越来越多的领域需要柔性电子皮肤与柔性可穿戴技术的支持,而其中最重要的就是柔性压力传感器的必要技术支撑。可拉伸压力传感器因其共形能力好和生物相容性高,在人机界面和电子皮肤领域展现出广阔的应用前景。
然而,困扰科学与产业界的难题之一,就是可拉伸的压力传感器在拉伸形变的时候,由于器件拉伸形变造成对压力测试的干扰噪声无法去除。因此,可拉伸压力传感器可以在人体皮肤和软体机器人皮肤表面有效地监测压力,而器件的拉伸形变会干扰压力检测的准确度。天津大学微电子学院智能系统与纳米工程实验室(天津大学小护士可穿戴技术联合实验室)(邹强团队)联合美国芝加哥大学团队,成功研发出一种新型的不受拉伸形变影响的可拉伸压力传感器。
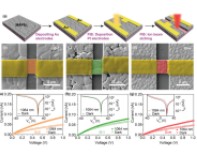
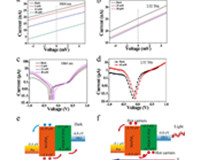
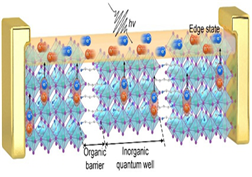
该传感器利用可拉伸离子凝胶材料作为压力传感介电层的独特机理,结合微米尺度的结构设计与力学设计,将器件的拉伸形变与压力检测中的压缩形变解耦,实现了在50%应变范围内98%的压力检测的对拉伸不敏感度。同时,该压力传感器的最低检测限低至0.2 Pa,且可以在有预压力(1 kPa)的情况下,准确检测30 Pa的压力增量。另外,该传感器可以在500次重复拉伸下,仍然保持与初始状态基本一致的压力传感性能与对拉伸不敏感度。
基于本传感器优异的压力传感性能,本研究工作还展示了可拉伸压力传感器作为电子皮肤为软体机械手提供触觉反馈,并成功用于远程诊疗的闭环控制系统中,这为未来的智慧康养等重大民生问题提供了有利的科技支撑,未来的市场应用前景广阔。
该研究成果《一种用于皮肤表面的不受拉伸形变影响的可拉伸压力传感器》(A stretchable and strain-unperturbed pressure sensor for motion-interference-free tactile monitoring on skins)于11月24日在线发表在《Science Advances》(DOI:10.1126/sciadv.abi4563)上。天津大学微电子学院博士生苏奇与其导师邹强副教授为论文共同第一作者。