根据外媒报道,苹果已经确定将在iPhone 12 Pro和iPhone 12 Pro Max等两款旗舰机中采用ToF传感器,用于开发AR内容和提升AR使用体验。

其实ToF传感器在手机中的应用最近几年也是屡见不鲜,它已经逐渐成为手机摄像的潮流,此前三星、华为、小米在其旗舰机后置摄像头上就搭载ToF相机。在工业相机领域,ToF已经被应用在机器人上,配合AI算法可以实现物体识别功能,辅助进行挑拣、打包、堆叠等操作。
ToF、双目、结构光的性能对比
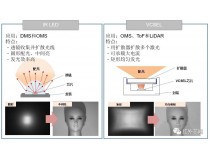
什么是ToF传感器?ToF传感器又名飞行传感器,是一种接近传感器,简单来说,它的主要原理是利用自身发出的对脉冲发射光在某种介质中行进一段时间到达物体并反射回传感器所用的时间来测量传感器与物体之间的距离,进而再通过ToF内部的图像传感器来确定测量的点形成的深度图像(景深)或者3D图像,前面所说的测量飞行时间来确定距离的方法其实有三种,分别为脉冲光法、幅度调制波的相移测量法以及带电电容器的差分电压测量法。

由于是通过发射器发射脉冲,ToF属于主动光探测方案,ToF的发射对脉冲光之前都需要对光进行高频调制后再发射,同时它还属于激光全面照射而非局部区域,所以ToF的功耗较大。当然,ToF最大的优点就是测距的优势,它的算法相对较为简单,对于目标的景深、位置等指标的测量较为精确。作为3D成像传感器,分辨率是ToF的最大问题,TOF相机上每一个像元对入射光往返相机与物体之间的相位分别进行记录,但比一般图像传感器更复杂,它包含2个或者更多快门,用来在不同时间采样反射光线ToF的像素要比一般图像传感器像素尺寸大得多,一般为100um。
除了ToF能够实现3D成像,另外讨论最多的是与双目立体视觉技术和结构光技术,对比起来,这三者的优缺点一目了然。

双目立体视觉技术可以类比为人的两只眼睛,带两个摄像头的手机通常都会使用这种方法获得深度信息,建立三维图像,也就是利用了视差的原理。由于双目立体视觉技术属于被动光探测,所以其功耗较小。但是双目立体视觉的算法较为复杂,在光照或者物体纹理不明显的时候,其工作效果会大受影响,这也是为什么双目立体技术的识别范围、响应速度等方面都不及ToF的原因。
其实结构光的提出是为了解决双目技术存在的问题(如,RGB双目很依赖图像的特征、受光照、纹理等影响),与ToF相似,结构光也是主动光探测,但是原理是基于光学三角测量原理,通过投射器投射编码好的结构光到被测物体表面,然后通过单个或多个相机拍摄被测表面即得结构光图像;最后,基于三角测量原理经过图像三维解析计算从而实现三维重建。正想上面所说,由于是主动投射编码光,结构光与ToF类似,对于光照的需求没有双目那么严格。同时,投影图案是编码好的,所以在一定范围内,结构光的测量精度较高。但是,在远距离测量方面,结构光不如ToF,如果物体离相机越远,编码的图案投射在物体上图案也就越大,精度也就随之降低,所以一般应用在近距离的场景。
ToF的未来究竟如何?