图4,SPAD横截面,来源:Wikipedia
dToF方案里另一个比较有代表性的传感器技术是前文就提到的SPAD(单光子雪崩二极管),它和APD的差别在于:它比APD更敏感,一个光生载流子就能触发大量雪崩电流;另外APD的dToF方案里,TDC(time-to-digital converter)的触发信号是由一个互阻抗放大器(TIA)产生的,而SPAD一般能够直接产生数字触发信号,也就是所谓的像素内TDC(in-pixel TDC)。SPAD相比APD得以实现小像素尺寸,而且与CMOS全兼容,SPAD像素阵列芯片级高度集成也就可行了。除了更低的时间抖动,单光子检测属性让脉冲宽度很短,输出功率也就可以比较高,SBNR自然可以更高。
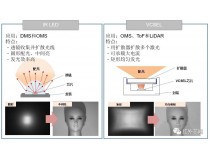
图5
在我们常说的LiDAR固态方案里,实施SPAD光电探测器,主动光源通过diffuser器件实现光线的漫射,而不需要真正的机械扫描动作,dToF就能实现并行的每个像素测量,以实现3D感知,从过去ToF仅用于单点测距,到如今3D视觉、建模这样的应用(图5)。当然APD技术实际上也在发展中,比如松下今年才发布了一种名为VAPD(垂直堆栈APD)的技术,以实现像素的小型化,能够实现远距离、高测距精度和更高的像素。
只不过由于SPAD传感器包括淬火电路在内的各种电路仍然比较复杂,如TDC需要占到很大的片上尺寸,像素也不可能做到像传统摄像头CIS图像传感器那么小——这些都是限制如今dToF传感器尺寸的原因。
图6,来源:TechInsights
从TechInsights近期公布的消息来看,iPad Pro 2020应用的LiDAR传感器可能来自索尼(但索尼已公开的DepthSense 3D Sensor似乎只有iToF方案),尺寸是18.0mm²,单像素大小10μm,分辨率具体为3万像素(图6)。虽然我们无法明确这颗传感器具体所用的是何种像素工艺及结构,但考虑到iPad成像模组的大小,这个像素数量在dToF类别中应该已经相当高了。iFixit公布的拆解视频中,也提到其LiDAR红外照明点的密度也远低于前置结构光的Face ID——这当然也是必然的。
从iPhone 7到iPad Pro 2020的发展,实则就是ToF从测距到3D感知的发展史,仅在短短的这些年间。
当然不止是苹果,LG、黑莓、华为等一众手机厂商实际也早就开始应用ToF方案了。华为Mate 20 Pro手机在距离感应方案上就应用了来自ams的ToF模组。从System Plus Consulting的拆解来看,这款手机的前置成像模组中包含了一个来自ams的128像素SPAD光电探测器,像素尺寸15μm;当然还有VCSEL光源。
比较有趣的是Mate 20 Pro的前置光学模组中的3D感知系统实际并不仅有ToF。主要用于面部识别的应该是个典型的结构光模组,其中的VCSEL激光光源都有两个,分别用于点阵投射器(DOT projector)和泛光照明器(flood illuminator),而且来自不同的供应商。当然这是题外话了。
3D感知正在普及的iToF
到了华为P30 Pro,后摄方案中也开始应用ToF技术,整体方案来自索尼。这应该是个iToF方案,图像传感器相对常规,像素尺寸10μm,4.7万像素;用于泛光照明的VCSEL光源来自Lumentum。
像iPad Pro那样在小尺寸移动设备上选择dToF做较大范围的3D检测,现在看来似乎仍是个比较奢侈的方案。因为如前文所述,dToF原理虽然直接,而且更为精确,但它对各组件的时间抖动要求是比较高的,且要求更大的输出功率。相对的iToF精度更低,却更容易实现高帧率,对各部分组件的技术要求也会相对低一些。