机器人的广泛应用解放了生产力,同时又促进了人类对机器人的研发重视。机器人从普通的单一功能逐步发展到具备模仿人类“大脑”的功能。导航系统则是机器人“大脑”的一项重要功能,近年来,激光导航机器人研究成为炙手可热的重要课题。
一、激光导航机器人综述
(一)激光导航机器人
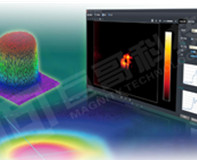
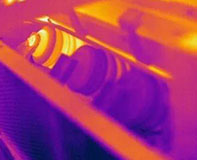
自主导航技术是机器人的核心技术之一,也是机器人研究和攻克的重点。激光导航机器人通常内嵌激光雷达和高分辨率激光扫描仪,探测其周围环境并进行定位,并通过AICU系统生成3D地图,从而进行路径规划。激光导航机器人可配备高清摄像机和红外热像仪等检测装置,在该导航系统支持下实行全自主自动巡检、红外诊断和外观检测,能够及时发现设备热缺陷和外观问题,将数据实时自动检测、传输、分析和告警,大大提高巡检自动化水平和检测的准确性。

(二)激光导航机器人构成及工作过程
激光导航机器人的硬件部分由微计算机、激光雷达和激光扫描系统、导航系统、控制系统、无线通信系统、信号采集系统、机器人本体组成。激光导航机器人导航系统工作时,激光雷达和激光扫描系统每隔数10ms旋转一周,发出经过调制的激光束,收到经调制的反射板的反射光后,经过调解解码,得到有效的信号,计算机可以及时读入当时收到的反射信号时激光器的旋转速度及倾斜角,从而描出周边“地图”实现导航。
二、激光定位导航工作原理
(一)激光定位原理
激光定位是利用旋转激光传感器检测路标,经三角几何计算确定位置和方向,并依此进行定位的方式,即通过测量已知路标与机器人之间的距离来实现机器人定位。通常,需要在目标环境中固定位置设定若干路标,建立坐标系,以激光传感器转动中心建立传感器坐标,记录传感器每扫描一周所形成的夹角,从而经计算出目标所处坐标的具体位置。
(二)导航控制原理
一般而言,机器人移动路径大多数为直线,对于行走路径中长距离转弯则可简化为直线路径代替,因此机器人导航控制就可归结为对机器人相对于当前运行路径的位置偏差和航向偏差的控制。在实际应用过程中,正是利用激光定位传感器解码并实时输出的高精度位置坐标数据,对当前位置及目标环境位置进行精准定位,通过微计算机向机器人控制系统下达指令信号,从而控制机器人左右两轮速度与方向,使其始着预先设定的路径运行。
三、基于激光导航电力巡检机器人系统设计
(一)硬件系统设计方案
激光导航电力巡检机器人主要由微计算机、智能控制系统、驱动系统、无线通信系统、传感与导航系统、人机交互系统等组成。驱动系统主要为满足驱动机器人本体之需要;无线通信系统主要用于下达控制命令;传感与导航系统主要机器人内外环境感知与运动操控;人机交互系统则是方便人类监控和介入机器人的相应状态和运行之需。
(二)软件系统设计方案