本文引用自作者:王钟嵘 郭宏宇 麦 文
文章摘要
电子调速器是将直流电转化成交流电驱动无刷电机的一种电子装置,简称电调。它具有调速和功率驱动两种基本功能。通常电调有3组功率场效应晶体管 (MOSFET)构成桥型驱动电路。由于电路中总是存在传输线路的差异、分布电容差异、器件延时差异等不确定因素影响,常常使得桥臂上下两只MOSFET管的导通或截至时间不同步。极易出现同一个桥臂中上下两只MOSFET出现短暂同时导通的情况,从而出现短时大电流脉冲。这个问题降低了电源效率,也容易使驱动管发热损毁。
本文通过使用任意波函数发生器AFG对电子调速器进行驱动和测试,在精准测量出各路桥臂时延特性后,经过驱动软件优化让电路达到了最佳控制效果。泰克AFG31000任意波函数发生器可产生任意脉冲波,具有双通道输出和极高的相位控制能力,对精准测量起到了非常关键的作用,也为本文实现高效驱动器起到了重要作用。
一、引言
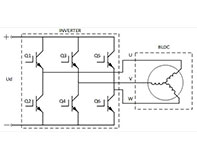
常见多旋翼无人机通常使用电子调速器作为电机的驱动部件,是一种比较常见的电机驱动装置。电子调速器的主要通过PWM脉冲来实现三相激励电流。典型的BLDC驱动如图1.1所示。Q1-Q6是6个MOSFET组成的直流转交流的逆变电桥,每只管子在驱动信号激励下,有序开通和关闭,形成交流驱动源。

图1.1 三相逆变桥结构图
但是,由于实际电路总是存在一些未知影响因素。例如,驱动管输入电容不一致、控制信号线长度不一致、驱动管开启与关断时延不一致等。使得一组桥臂的两个MOSFET管的导通或截至的时间不同步,极易出现同一个桥臂的两个管子同时导通的情况。当上下两个MOSFET管同时导通时,尽管时间非常短暂也会形成极大的短路脉冲电流,导致电源效率下降,驱动管子发热等现象,甚至损毁驱动管。
本文通过任意波函数发生器AFG对无刷电子调速驱动电路进行实验测试解决驱动不一致问题。在精确测量出驱动信号经过每组MOS管所产生的时延后,根据所测的时延差数据,通过软件进行调整和优化,最后使驱动电桥到达最优工作状态。
二、电调硬件设计
如图2.1所示,该部分为电子调速器A相输出,驱动器使用了集成电路。图2.2是完整实验板PCB,可以发现制作PCB板的时候由于走线原因,A相驱动线是两根不等长的线,A_H线较长,A_L线较短。

图2.1 电子调速器A相驱动电路原理

图2.2 电子调速器PCB
三、实验测试与软件优化
泰克AFG31000任意波函数发生器可以输出双路驱动信号,每个通道独立可调整,将双路输出调整为可以激励双输入模式,通过示波器观察将激励信号的在电路板上的驱动点位置将边沿对齐。

图3.1 双通路高速示波器测试A_L端信号激励点到电机接口时延
图3.1中可以观察到A_L端信号通过线路及驱动器件后产生的时延。信号在下降沿部分产生了弯曲变化,这可能是线路上分布电容引起的。对所有驱动端分别激励并测量出每个通道的时延。表1给出了各个通道测量结果,可以看到B相和C相近似相等,A相最差。从PCB电路上可以发现A相两路信号对称性最差,B相和C相接近一致。A相有约2us的时延差别。
表1 各信号通路延时值测量