图5 雷达识别为同车道示意图
同时,R&S发现当AREG同时模拟5米、15米和50米的3台车辆时,VUT的雷达会在20米距离处探测到第4个目标。 而第四个目标不是预定目标,是由于AREG发射机在饱和状态下工作造成的。
解决方案:通过将基础衰减设置从- 22dB降低到- 5dB(较低的增益)来解决。
最后,尽管视觉投影屏幕的安装看起来很简单,但如果设计不正确,可能就得不到理想结果。例如,当屏幕不平整或翘曲时,就会影响摄像头传感器的视觉检测。
解决方法:视觉投影屏幕夹具的设计应允许适当调整屏幕布的张力,使屏幕平滑。设置屏幕夹具结构所花费的时间超出预期。
成果
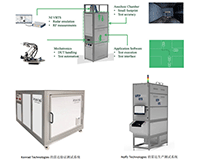
在多个项目中,R&S已证明了ADAS在复杂电磁环境中的测试解决方案R&S®TA-ACE的实用性。通过在EMC测试暗室中生成道路场景,模拟车辆的视觉和雷达传感器所需的激励,成功唤醒了自动驾驶车辆ADAS系统的预期响应。在EMC暗室中成功实现了摄像头和毫米波雷达模拟道路场景作为实况视觉投影和实况雷达回波效应的自动控制和同步,减少了由实况视觉投影系统设置造成的摄像头视觉误差,并完成自动化测试。