近两年来媒体报道似乎给公众传递一种讯息:调频连续波(FMCW)激光雷达(LiDAR)优于飞行时间法(ToF)激光雷达,是未来激光雷达的终极技术路线。
本文对当前业界关于ToF系统与FMCW系统的主张进行了详细的技术比较。希望这有助于从业者理解激光雷达系统的取舍,从而激发更有利的知情讨论、竞争,最终促进应用于自动驾驶的ToF激光雷达和FMCW激光雷达的共同进步。

主张1:FMCW是一项(全新的)革命性技术
这不是事实。
事实恰恰相反,FMCW激光雷达已经存在了很长时间,它起源于二十世纪六十年代麻省理工学院林肯实验室,也就是在激光器发明七年后诞生。不幸的是,多年来我们从FMCW技术中学到的许多经验教训却未被应用于公共领域,早已被人们遗忘。近年来看到的变化就是长相干长度激光器的使用普及率提高。从理论上讲,它可以提供极高的信号增益,合理地激发人们对既有技术的兴趣,但是要使这种激光雷达适用于自动驾驶汽车,仍然必须解决一些过去就已有定论的“病根”。如果无法解决,那么声称“全新”FMCW激光雷达能收集到远距离、小尺寸物体的数据信息并经济有效地解决汽车行业面临的挑战,这种说法将被证实是不正确的。
主张2:FMCW激光雷达能更快地探测/跟踪更远距离的目标
未经证实。
ToF激光雷达可以提供非常高的激光发射频率(shot rate),以AEye公司的ToF系统为例,每秒可发射几百万次,扫描速度快,返回速度更快,感兴趣区域(ROI)密度高。与其它激光雷达系统相比,效率提高2~4倍。相比之下,许多低复杂度的激光雷达每秒只能发射数万到数十万次(慢50倍)。因此,从本质上讲,我们是将纳秒级停留时间(dwell time)、高重复率与数十微秒级停留时间和低重复率(每对激光器/接收端)进行比较。
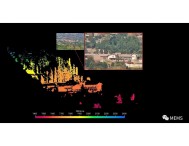
激光发射频率会严重影响激光雷达对远距离物体的探测、采集(分类)和跟踪,这是因为更高的激光发射频率(空间和/或时间)可提供更多信息,从而更快地探测到物体,并更好地过滤噪声。AEye曾展示了一种能够对低反射率物体进行多点探测的系统,对象包括:200米以外小型物体和行人、300米以外的车辆和1000米内的3级卡车。这充分证明了ToF技术的测距能力。实际上,几乎所有的激光测距仪都利用ToF技术而非FMCW技术进行距离测量(例如Voxtel公司提供的测距仪,一些产品具有超过10千米的最大探测距离)。尽管最近有文章声称FMCW技术的探测距离更远,但我们还没有看到可以与先进ToF系统探测距离相当的FMCW系统。
主张3:FMCW更准确有效地提供速度和距离信息
这是误导。
ToF激光雷达确实需要多次发射激光以确定目标物体的速度。与FMCW激光雷达所称的单次激光发射相比,这似乎是额外的“开销”。更重要的是,并非所有速度测量意义都是相同的。尽管两辆汽车正面行驶时的径向速度是非常重要的(原因之一:激光雷达对最大探测距离参数的要求是越大越好),其实横向速度也很重要,因为横向速度引起的紧急情况占90%以上。闯红灯的汽车、转向的车辆、闯入街道的行人,都需要横向速度才能做出规避危险的决策。FMCW激光雷达不能一次性同时测量横向速度,在横向速度测量方面要超越ToF激光雷达并不容易。
假设有一辆汽车以30~40米/秒的速度行驶时被激光探测到。如果在短时间内第二次发射激光,例如在第一次发射后50微秒,则目标在这个时间间隔内仅移动了约1.75毫米。为了建立具有统计学意义的速度,目标应该移动至少2厘米,大约需要500微秒,同时需要足够的信噪比(SNR)才能对距离样本进行插值。通过第二次测量,在与帧速率相比可忽略的时间范围内建立统计显著的距离和速度。以AEye开发的激光扫描仪为例,500微秒并不是专用于速度估算,可以在此时间段内向目标多次发射激光。在对原始目标反馈高置信度速度测量值之前,可以巧妙地利用时间查看其它区域或目标。而FMCW激光雷达在其整个停留时间内都只能专用于速度测量,成为这个测量项的“俘虏”。
要解决上述问题,FMCW激光雷达通常至少需要两次激光频率扫描(向上、向下)以实现明确探测,向下扫描可以解决“距离+多普勒频移”组合引起的模糊问题。这使每次激光发射所需的停留时间增加了一倍,超出了上一段文字描述的时间。目标在10微秒的位移量通常仅为0.5毫米。这种位移水平处于难以将振动与实际线性运动区别。同样,谈及横向速度,FMCW激光雷达系统根本不能像ToF激光雷达系统那样不进行多位置估算就做到立即探测横向速度,但又需要较长的停留时间。
在一种极端的ToF激光雷达系统示例中,AEye演示了探测1千米处的物体。即使需要连续发射两次才能获得1千米处物体的速度,也明显看出在常见20Hz帧频和典型车速的情况下,表现优于对100米处物体一次发射的效果。

主张4:FMCW技术干扰较少